| 工作原理 | 磁敏传感器 |
|---|---|
| 传感器类别 | 射线辐射传感器 |
| 材质 | 聚合物 |
| 型号 | 模拟传感器 |
|
|

 |

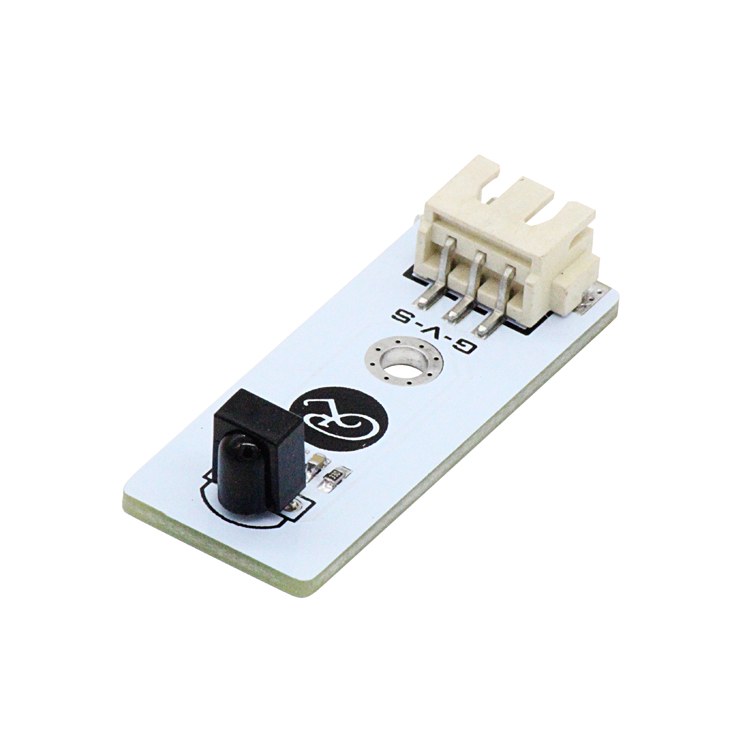
红外遥控传感器,与Arduino、Freedom等开源硬件专用传感器扩展板的3Pin接口结合使用,能够实现非常有趣的互动作品。红外遥控同时也是我们生活中最常见的遥控方式,你每天使用的电视遥控器和空调遥控器都是使用这个原理。运用Arduino搭建红外遥控设备也非常简单。你只需一个红外遥控传感器(接收信号)、红外遥控器(发射信号)和Arduino控制器(控制特定的设备)就可以实现了。
 接线方式:蜂鸣器接在Arduino开发板的10号引脚处;红色LED接在11号引脚处;红外接收一起模块接在8号引脚处。烧录测试程序。
接线方式:蜂鸣器接在Arduino开发板的10号引脚处;红色LED接在11号引脚处;红外接收一起模块接在8号引脚处。烧录测试程序。
测试程序:
#define BUZZER 10//蜂鸣器
#define LED_RED 11//红灯
#define IR_IN 8 //红外接收
int Pulse_Width=0;//存储脉宽
int ir_code=0x00;//命令值
void timer1_init(void)//定时器初始化函数
{
TCCR1A = 0X00;
TCCR1B = 0X05;//给定时器时钟源
TCCR1C = 0X00;
TCNT1 = 0X00;
TIMSK1 = 0X00; //禁止定时器溢出中断
}
void remote_deal(void)//执行译码结果函数
{
switch(ir_code)
{
case 0xff00://停止
digitalWrite(LED_RED,LOW);//红灯不亮
digitalWrite(BUZZER,LOW);//蜂鸣器不响
break;
case 0xfe01://VOL+
digitalWrite(LED_RED,HIGH);//红灯亮
break;
case 0xf609://VOL-
digitalWrite(BUZZER,HIGH);//蜂鸣器响
break;
}
}
char logic_value()//判断逻辑值“0”和“1”子函数
{
while(!(digitalRead(8))); //低等待
Pulse_Width=TCNT1;
TCNT1=0;
if(Pulse_Width>=7&&Pulse_Width<=10)//低电平560us
{
while(digitalRead(8));//是高就等待
Pulse_Width=TCNT1;
TCNT1=0;
if(Pulse_Width>=7&&Pulse_Width<=10)//接着高电平560us
return 0;
else if(Pulse_Width>=25&&Pulse_Width<=27) //接着高电平1.7ms
return 1;
}
return -1;
}
void pulse_deal()//接收地址码和命令码脉冲函数
{
int i;
//执行8个0
for(i=0; i<8; i++)
{
if(logic_value() != 0) //不是0
return;
}
//执行6个1
for(i=0; i<6; i++)
{
if(logic_value()!= 1) //不是1
return;
}
//执行1个0
if(logic_value()!= 0) //不是0
return;
//执行1个1
if(logic_value()!= 1) //不是1
return;
//解析遥控器编码中的command指令
ir_code=0x00;//清零
for(i=0; i<16;i++ )
{
if(logic_value() == 1)
{
ir_code |=(1<<i);
}
}
}
void remote_decode(void)//译码函数
{
TCNT1=0X00;
while(digitalRead(8))//是高就等待
{
if(TCNT1>=1563) //当高电平持续时间超过100ms,表明此时没有按键按下
{
ir_code = 0xff00;
return;
}
}
//如果高电平持续时间不超过100ms
TCNT1=0X00;
while(!(digitalRead(8))); //低等待
Pulse_Width=TCNT1;
TCNT1=0;
if(Pulse_Width>=140&&Pulse_Width<=141)//9ms
{
while(digitalRead(8));//是高就等待
Pulse_Width=TCNT1;
TCNT1=0;
if(Pulse_Width>=68&&Pulse_Width<=72)//4.5ms
{
pulse_deal();
return;
}
else if(Pulse_Width>=34&&Pulse_Width<=36)//2.25ms
{
while(!(digitalRead(8)));//低等待
Pulse_Width=TCNT1;
TCNT1=0;
if(Pulse_Width>=7&&Pulse_Width<=10)//560us
{
return;
}
}
}
}
void setup()
{
unsigned char i;
pinMode(LED_RED,OUTPUT);//设置与红灯连接的引脚为输出模式
pinMode(BUZZER,OUTPUT);//设置与蜂鸣器连接的引脚为输出模式
pinMode(IR_IN,INPUT);//设置红外接收引脚为输入
}
void loop()
{
timer1_init();//定时器初始化
while(1)
{
remote_decode(); //译码
remote_deal(); //执行译码结果
}
![]()